
UPenn’s Mechatronics course, MEAM 410/510, was one of the most intense and rewarding courses of my academic career, and allowed me to create some pretty cool robots over the course of the semester. Mechatronics is the synergistic integration of mechanics, electronics, control theory, and computer science to design and manufacture useful products. It’s an inherently interdisciplinary field, and course instructor Jonathan Feine has done a great job in creating a highly engaging, project-based course with an emphasis on design. The final project, Robockey, is showcased here.
Robockey
Robockey was the epic capstone to MEAM 510 – a rough-and-tumble five-week project in which groups of three or four students build a team of three little robots that play hockey autonomously – no remote controls, no calling plays from the sidelines, nothing.
The project combines all the key elements of the course: mechanical design, electronics, programming, sleep deprivation, and overcaffeination. My team, comprised of Joe Polin, Jon Greco, Justin Starr, and myself, did quite well in the final tournament, placing third out of seventeen overall. The final tournament was actually a very well-produced public event, and a ton of fun. For more information, feel free to visit the official robockey website.
Here is an awesome video put together by my teammate Joe Polin which showcases our mechanical design and a little game footage:

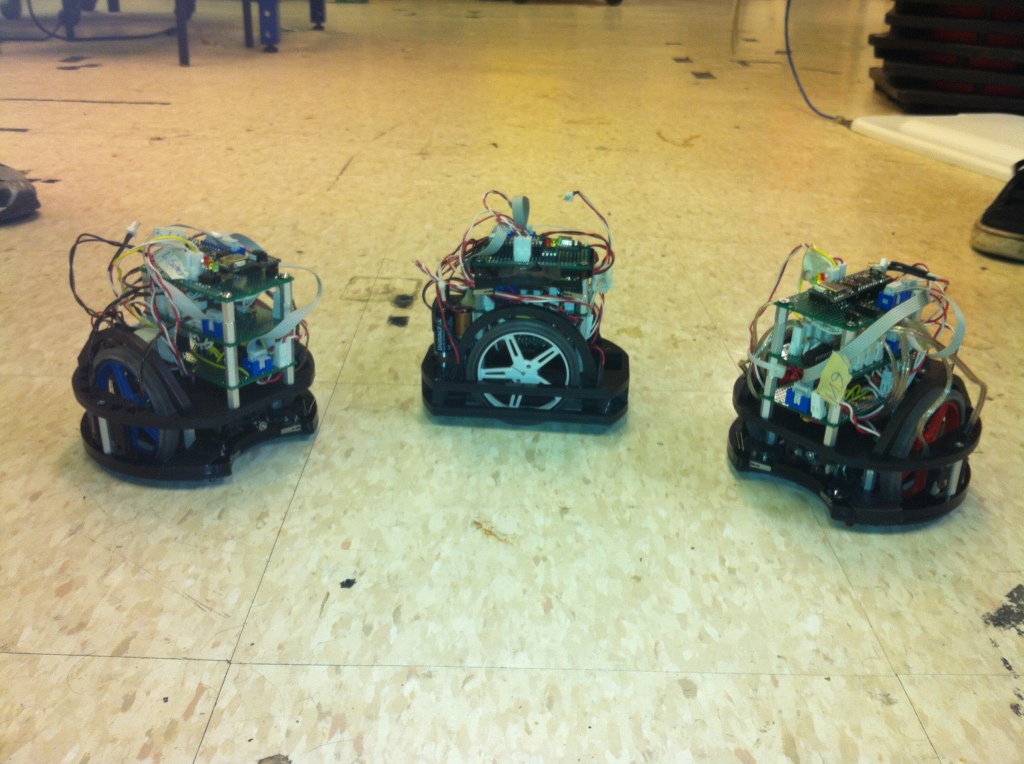
Our team was red-white-and-blue themed, and our robots were named (sort of) after united states presidents – Millard Killmore, Martin Van Bruisin’, and Grover Cleaveland. I don’t think there was any questioning the fact that we had the most team spirit at the public tournament – a significant portion of Joe and Justin’s fraternity showed up to cheer us on, and we were even featured in the Philadelphia Inquirer.
Some more pictures and videos of our robots can be found below…
Here’s a video of us showing our robots off to a bunch of elementary school kids who happened to be walking by while we were testing. (warning: extremely adorable).
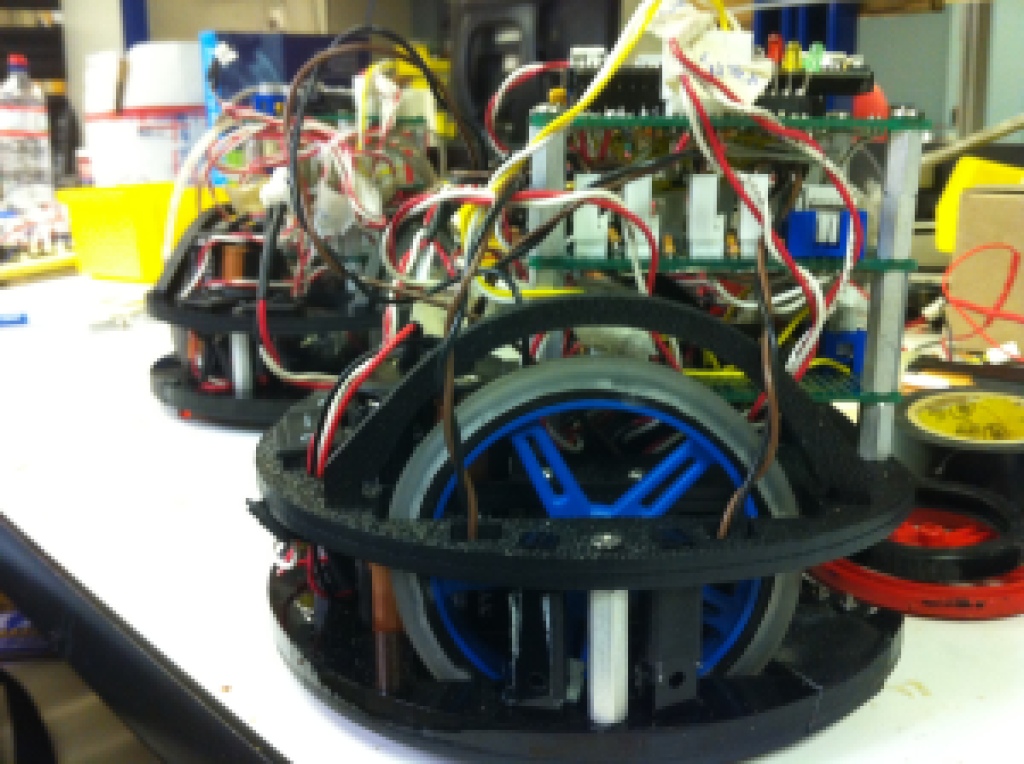
Here are some shot of one of our robots from the front and side. Three circuit boards housed the motor drivers, phototransistor connections, and microprocessor. Gummy silicone tires provided a big traction advantage.

Kaboom! This is what happens when you rapidly thrash positive and negative 12V from a 500mA-rated LiPo through an H-Bridge motor driver. Don’t try this at home, kids.
